汤元科技:重构真实交通物理场景,推动空间智能发展
在近期召开的“2025年苏州市相城区新型工业化推进会议”上,汤元科技发表题为《真实物理世界的全要素数字还原——空间智能的必由之路》的主题演讲,分享了公司基于路侧数据的空间智能核心技术突破及商业化路径。
通过自研的“I2V (Infrastructure to Vehicle) 级联视角增强算法 ”,汤元科技破解智能驾驶训练数据稀缺难题,通过路侧采集数据挖掘重建高质量场景、并生成车端视角,为自动驾驶训练提供高价值、物理真实、低成本的数据,助力智能驾驶量产提升和端到端训练降本增效。
从二维到三维、从单帧静态到时序动态的数据
有别于传统通过车队采集训练数据的方法,汤元科技依托苏州车路云一体化基础设施,通过自研的“I2V 级联视角增强算法”,实现了在稀疏视角下的三维空间高精度重建能力 。其特点是:从二维到三维、从单帧静态到时序动态,重构真实交通物理世界场景,使高价值交通数据得到有效地采集、挖掘和应用。
在这套方案中,仅依靠较少的路侧传感器作为输入(如一个路口的3 - 4个摄像头),既可高精度还原动态三维大交通场景,又可以还原所有物体的三维结构和表面纹理,在此基础上,还可实现任意视角的还原 。通过高价值场景挖掘,其还原的数据集用于智能驾驶的高阶量产和端到端训练。
以苏州高铁新城的一个十字路口为例:
首先,把以上信息作为输入源;然后,对道路环境和交通对象进行高精度三维重建;再次,以任意视角重新渲染生成视频。以下为车端第一视角:

图片▲不仅重建了路口所有物体的三维结构、运动轨迹与表面纹理,甚至还可精细还原施工现场升起的烟雾
其背后的技术能力,既包括静态交通场景的重建,又包括动态车辆和行人的重建:

由于对整体场景进行了三维重建,获取了每个物体的三维空间信息,因此可省去部分传统的视觉任务,如语义分割和人工标注,极大降低了数据处理成本。

自动驾驶训练新范式,显著降低成本
依托苏州市的高质量路侧设备,汤元科技基于“I2V级联视角增强算法”构建了“数据采集 - 三维重建 - 场景生成 - 车企赋能”的闭环。这一方法具备诸多优点:
- 物理真实:基于完全物理真实的数据场景,可有效进行智能驾驶量产升级和端到端训练,提升自动驾驶系统的复杂环境应对能力;
- 数据质量高:路侧数据不同于单帧和断点数据,具备时序连续的特点;且受益于输入源设备高度较高,视角开阔无遮挡,可连续观测;
- 数据获取挖掘成本低:可通过路侧7*24h直接获取高价值三维场景数据,将数据采集成本降低80%以上;同时在数据处理上,天然具备语义分割信息,极大降低标注成本。
预计在2025年将生成百万段级自动驾驶长尾训练场景,并在明年突破千万段级,有效跨越自动驾驶量产和端到端训练的数据门槛。
让数据流动,让基础设施“活”起来
目前,仅苏州市已有逾7000个具备智能化感知设施的路口,而这一应用也同时使得:
- 路侧设施价值激活:将传统监控设备转化为“数据生产源”,释放其智能化潜力;
- 数据资产循环:使数据流动并应用,推动自动驾驶与城市治理的双向赋能。
而其在交通能力应用,终极目标是空间智能——实现三维空间中感知、理解和交互的能力。
空间智能趋势下,数据是燃料
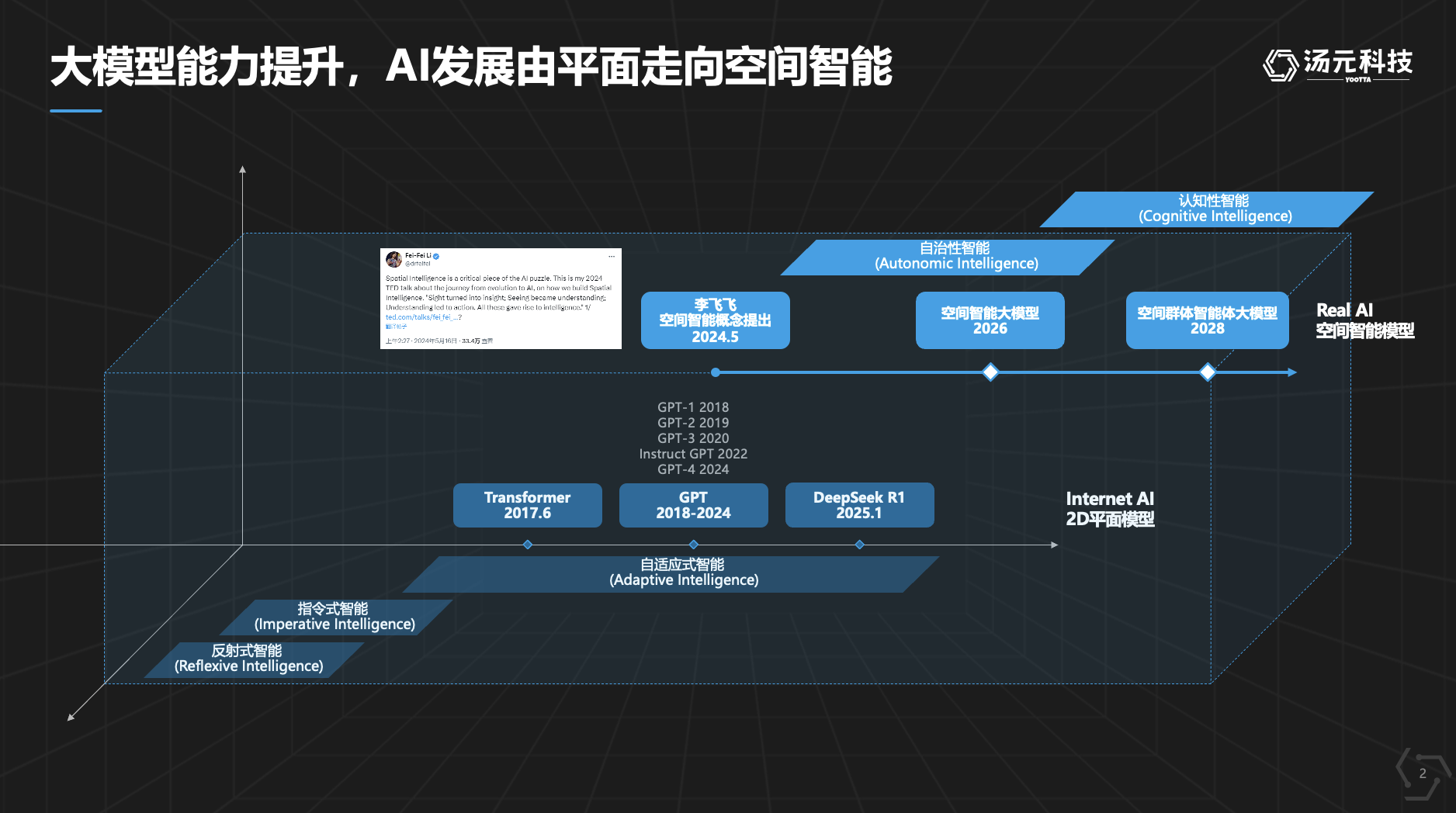
人工智能经过Transformer的自注意力机制并行处理序列数据、GPT系列验证了海量数据 + LLM对效果的提升,及DeepSeek - R1通过强化学习实现对AI模型的推理能力的自发涌现,世界正加速向三维空间智能跃迁。
随着空间智能的发展,AI将从平面走向立体智能,进而迈入自治性智能和认知型智能的高维智能。
在此过程中,高质量三维时序数据的匮乏成为行业核心瓶颈,其特点是数据要素内容多、需要时序变化的数据和规模庞大的数据。

在空间智能的发展中,汤元科技从数据稀缺的难题切入,未来,其应用还将从智能驾驶拓展至机器人、无人机等领域。

▲图为活动现场
-正文完 -
汤元科技成立于2024年,公司位于苏州。公司致力于打造智能网联数据资产运营能力,通过整合车路云一体化的路端数据资源和处理能力,提供大规模、多源异构、高质量、低成本的智能驾驶量产数据,并为客户提供全面的数据采集、加工、存储和模型训练等基础服务,并最终实现空间智能。